 GDU
GDU
 UUUFLY
UUUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN KEEL
KEEL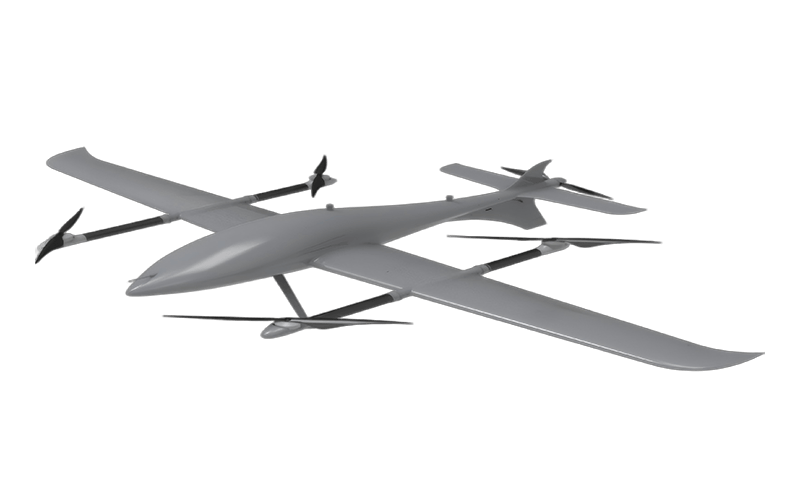 SKY NEXT
SKY NEXT- DJI Matrice-4T
- DJI Matrice 4E Drone
- DJI Matrice 4TD
- DJI Matrice 30T
- DJI Mavic 3 Emterprise
- DJI Mavic 3M Multispectral Drone
- DJI RC 2 Plus Industry Plus
- DJI Matrice 4 Series Battery
- DJI Matrice 4D Series Batteries
- TB65 Intelligent Flight Battery
- TB100 Smart Flight Battery
- WB37 Battery
- DJI Accessories

Dragonfish Standard:Next-Gen Multi Mission eVTOL
Dragonfish Standard Versatile Multi-Mission eVTOL UAV
Balanced Endurance, Payload Flexibility & Quick Deployment for Industrial & Public Safety Applications

Dragonfish Standard Versatile Multi-Mission eVTOL UAV
Balanced Endurance, Payload Flexibility & Quick Deployment for Industrial & Public Safety Applications
Silent Flight
The Dragonfish achieves ultra-silent flight through its exceptional propulsion system and innovative noise-reduction design. Barely audible above 400 ft (120m) AGL*, the DF significantly reducing the risk of detection while ensuring operational secrecy.
Learn More >>

Silent Flight
The Dragonfish achieves ultra-silent flight through its exceptional propulsion system and innovative noise-reduction design. Barely audible above 400 ft (120m) AGL*, the DF significantly reducing the risk of detection while ensuring operational secrecy.
Learn More >>
Superior Anti-Interference
In complex environments, the UAV maintains exceptional communication and video transmission performance, featuring strong anti-interference capabilities and stable, reliable transmission.

Superior Anti-Interference
In complex environments, the UAV maintains exceptional communication and video transmission performance, featuring strong anti-interference capabilities and stable, reliable transmission.
Why Professionals Choose Dragonfish Standard ?

GNSS Loss Protection
When operating in non-GNSS environments, the UAV activates landing protection, automatically descending from its current position to ensure safety.
Low-Battery Return
Users can customize the expected landing battery level. The UAV calculates the optimal return timing in real-time based on current battery levels and flight status, ensuring it lands with a battery level close to the user-defined threshold.
Lost-Signal Return
If signal between the UAV and the ground station is interrupted, the loss-of-connection protection activates. If GNSS signals are available, the UAV initiates automatic return-to-home.
Emergency Manual Override
In case of an emergency, you can switch the remote controller to M mode at any time to immediately take manual control, ensuring flight safety.

Multiple Redundancies, Ensuring Mission Safety
The eVTOL features multi-level redundancies across key components (batteries, sensors, communication buses) and autonomous mode switching, ensuring stable flight and reliable performance even in complex environments.
One-Tap Self-Check
Automatically performs a system check before takeoff, ensuring every flight is safe and reliable.
One-Button Return
Easily return to home via the Home button. Convenient Storage: Quickly organize after flight, easy to store and ready for the next use.
Intelligent Tracking
The UAV can lock on to its targets and flexibly adjust its flight path. Supports multiple tracking modes.

Mobile Platform Takeoff and Landing
Supports takeoff and landing on moving platforms.
Specs of Dragonfish Dragonfish Standard
| Specification | Details |
| Type | Tilt-Rotor Multi-Mission eVTOL UAV |
| Dimensions | 1948 × 3295 × 520 mm (including propellers) |
| Weight | 7.5 kg (incl. 2 batteries, propellers; excl. gimbal payload) |
| Max Payload Capacity |
1.5 kg |
| Max Flight Time | 126 minutes (with standard payload configuration) |
| Max Horizontal Speed |
120 km/h |
| Max Horizontal Speed | 126 km/h (35 m/s) |
| Max Wind Resistance | 15 m/s (fixed-wing mode), 12 m/s (vertical flight mode) |
| Max Service Ceiling | 5000 m above sea level |
| Operating Temperature | -20°C to 50°C |
| IP Rating | IP43 |
| GNSS Support | GPS + GLONASS + BeiDou + Galileo (multi-constellation positioning) |
| Max Signal Transmission Range | 30 km |
| Deployment Time | ≤5 minutes (tool-less quick-release assembly) |
Size Comparison

Accessories

Dragonfish Ground Station

Autel Smart Antenna Transmission (ASAT) (Optional)

Autel Dragonfish Nest (Optional)

Dragonfish Repeater (Optional)
Adaptation product

Coastal Anti-Smuggling

Police Enforcement

Forest Fire Prevention

Power Line Inspection

Traffic Inspection




